01. Overview
Project Overivew
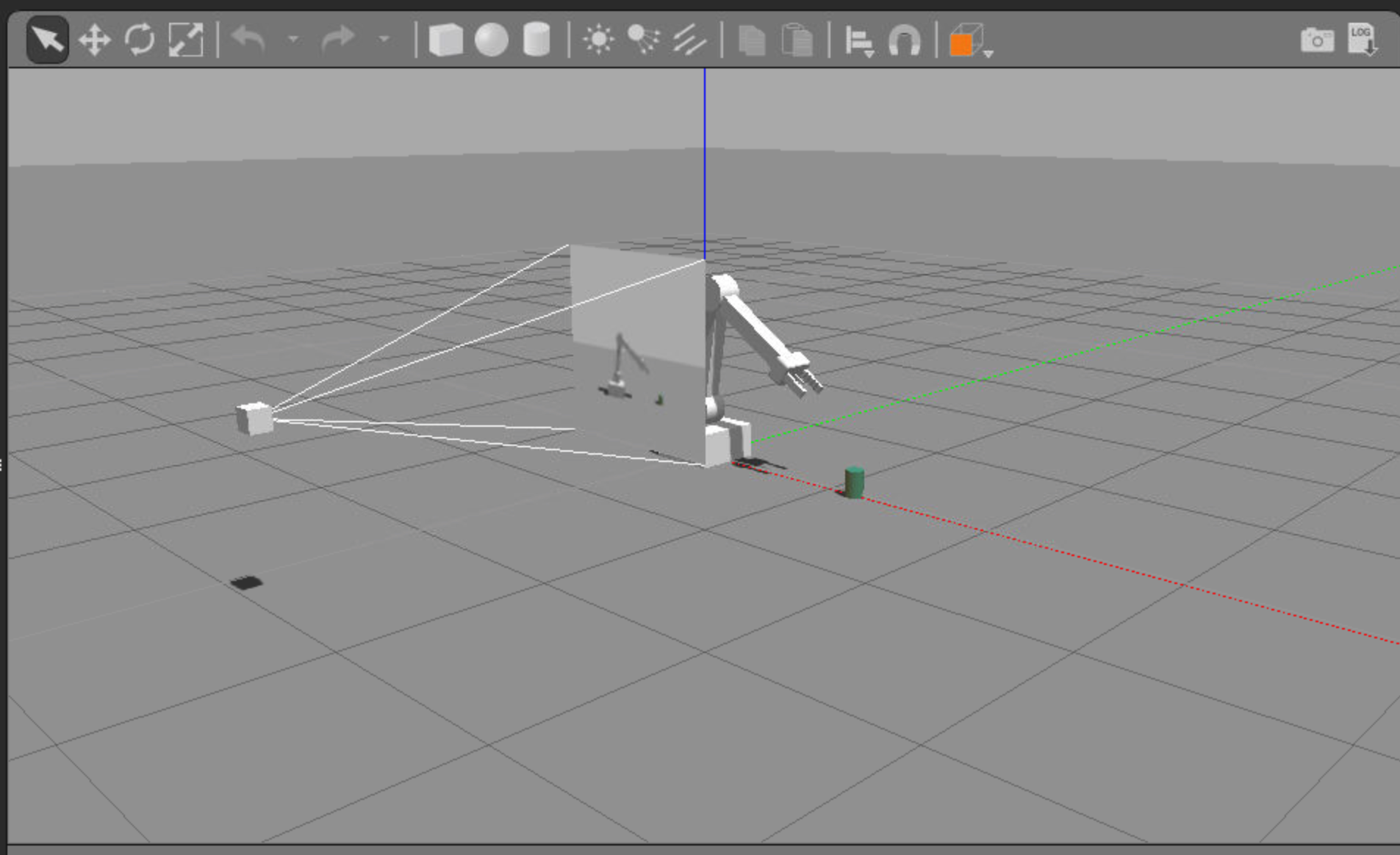
Welcome to the Deep RL Arm Manipulation project! For this project, your goal is to create a DQN agent and define reward functions to teach a robotic arm to carry out two primary objectives:
- Have any part of the robot arm touch the object of interest, with at least a 90% accuracy.
- Have only the gripper base of the robot arm touch the object, with at least a 80% accuracy.
Both of these objectives, have associated tasks that you will complete while working on this project. The upcoming sections will cover these tasks in detail.